一家明星企业的冉冉升起,永远无法只靠单打独斗。
文|高工机器人
“人形机器人是ChatGPT的灵魂载体。”这种构想正在成为现实。
近日,某位工程师将 ChatGPT 和波士顿动力公司的机器狗Spot结合起来,使得Spot能够和人类进行语音交流,还能通过点头和摇头来回应问题。
当今最先进的人工智能,搭配顶尖的机器人载体。在爆火的ChatGPT之外,另一主人公——波士顿动力,同样值得关注。
事实上,波士顿动力是讨论“人形机器人”无法避开的传奇性企业,无论赛道怎样风起云涌,新星层出不穷,波士顿动力产品始终是行业的标杆。无数挑战者试图对比、超越、但充其量只是一场越级的“碰瓷”。

从1983年第一台蹦蹦跳跳的单腿机器人,到如今精通各种酷炫技能的“明星”Atlas。波士顿动力在40年发展中,将人类机器人梦想一步步照进现实,同时也屡屡挣扎在商业化困局,八年三易其身。
波士顿动力这家传奇企业究竟是如何诞生的?身为技术最领先的企业之一,却又为何屡屡被变卖?
在探寻答案的过程中,人形机器人甚至整个移动机器人产业,都能从其优势与困境中映射自身,获得启示。
波士顿动力的发展历程中有四个重要节点,在早期其为军方服务,之后分别被谷歌、软银和现代汽车收购。
在不同的时间节点,波士顿动力持续推出了一代代惊艳的机器人作品。目前的核心产品有系统Pick、机器狗Spot、两足机器人Atlas、和手柄Handle。
1、军方合作:BigDog与Atlas的诞生
1992年,波士顿动力成立。
但早在1983年,创始人马克·雷伯特就造出了一台单足机器人。这台简易的机器人,虽然只有一条腿,只能在蹦跳移动,但平衡性极好,机动能力也很强。

后来,雷伯特又做出一个四足机器人,即BigDog的雏形。不久,雷伯特将主要从事研究与机器人相关的控制、机器视觉方面技术的CMU leg实验室,从卡内基·梅隆大学搬到了麻省理工,逐渐孵化出波士顿动力的雏形。
起初,波士顿动力的主要服务对象是美国军方,并获得美国军方超千万美元的投资。在此期间,波士顿动力推出了许多产品,包括声名大噪的四足机器人BigDog、阿尔法狗LS3、四足机器人Cheetah(猎豹)和可自由跳跃旋转的Wildcat(野猫)等。
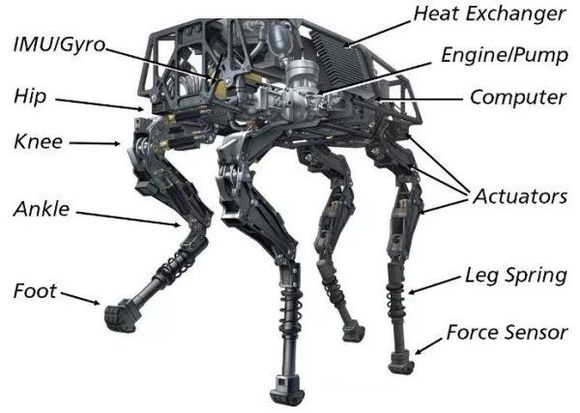
BigDog
BigDog在2005年左右面世,高度约为1米,重量约为109公斤,可以背负45公斤的重物进行自由行走或奔跑,最快移动速度可达6.4公里/小时。
在波士顿公司发布的宣传视频中,BigDog在装载着重物的情况下,仍能对人类从其侧面的脚踢做出灵敏的反应,不会被踹倒。在实际运用中,BigDog主要帮助美军背负装备、运输物资。不过因为BigDog噪音太大,无法在战斗中使用,项目只能中止。

petman
尽管项目中止了,但在美国军方的支持下,波士顿动力开始重点投入对双足机器人的研究工作,并从BigDog中改进出了一款人形双足机器人Petman。经过一段时间研究后,2013年,由双足机器人Petman迭代而成的Atlas原型机亮相。

Atlas初代机
初代Atlas专为各种搜救任务设计,身高近1.9米,重150公斤,身上还缀着一条电缆来外接电源。但它已经可以实现走路和跳跃等基本动作,遭重击后能单腿站立。但当时的Atlas还要靠钢缆辅助才能完成一系列动作。
2、谷歌阶段:Atlas和Spot机器人的进化
2013年底,波士顿动力被Google以30亿美元收购。由此,波士顿动力也中止了与军方的合同。
进入Google 麾下后,波士顿动力继续完善两款重磅产品——人形机器人Atlas和Spot系列机器狗。
被收购第三年后,新一代Atlas终于正式亮相,但这一次大的改进是摒弃了传统的接线供电,采用激光雷达和机器视觉实现了自主导航、定位和行走。

在此期间,波士顿动力推出了早期的Spot四足机器人。在公司发布的视频中,相较BigDog,Spot实现了低噪运行,可以借助两条肢体在原地跳跃而不摔倒,并且可以灵活上下楼梯。

Spot
之后推出的Spot Mini,重量仅为25公斤,比Spot更加小巧轻便,并在头部增设了一幅机械臂,可以灵活操控物体。
尽管如此,本意强强联合的Google,在对波士顿动力持续投入研究资金与科技资源后,发觉其尖端技术依然离落地变现有不小距离,在3年之后还是选择将波士顿动力出售。
3、软银阶段:商业化进程第一步
2017年,软银集团以不公布价格的方式,从Google手里拿到了波士顿动力控制权。
尽管没有透露软银为公司提供了多少研发费用,但马克·雷伯特表示,无论是Google还是软银,都为公司提供了充足的资金。
在充足的资金支持下,波士顿动力开始着力将研究成果进行商业化。波士顿动力CEO马克·雷伯特曾在外媒论坛上表示,公司的发展有两个策略方向,一是通过长期的投资,打造出人类梦想中的机器人;同时致力于打造机器人商品。
在打造人类梦想中的机器人方面,从2016年至2020年间,站在机器人研究金字塔尖的Atlas飞速进化,外表越来越酷炫。Atlas改用了锂离子电池组,液压驱动系统的具有强悍的负载能力,在保持稳定性的同时,体积也更小。

其技能的迭代肉眼可见,仅仅过去一年,比起在2016年走路还踉踉跄跄的样子,Atlas的动作明显流畅了很多,不仅能在台阶之间跳跃,甚至还能来个后空翻。2018年,Atlas学会了跑步,能跨越障碍物,一步步跃上宽阔的台阶。次年,它已经能连续跳跃、翻滚和倒立。
2020年6月,波士顿动力迈出了商业化的重要一步。Spot Mini 以74500美元,折合人民币约50万元的价格发售。在理想场景中,Spot Mini可应用于警署、石油公司、机场建筑工地、还能充当雪橇犬、牧羊犬。

Spot Mini
下半年,波士顿动力宣布四足机器人Spot进入加拿大、欧洲市场。波士顿首席执行官Robert Playter曾透露,截至2020年9月份,其已经出售或者租赁了250个机器人,而且销售速度在增加。
4、现代汽车阶段:人机协作的可能
但历史在重复,同样在三年后,波士顿动力被软银出售。2020年底,现代汽车集团以9.21亿美元价格接手波士顿动力,直到2021年6月才完成收购。波士顿动力似乎受易主的影响不大,继续发布了Atlas跳舞的视频。

2022年9月,现代汽车和波士顿动力宣布初始投资超过4亿美元,启动新的波士顿动力人工智能研究所。这意味着波士顿动力或再将研发和产业化摆到同等位置。
如今,Spot已经正式走入现代汽车工厂,而Atlas也能靠自身传感器感知环境,自主行动。除跑酷、跳舞,持续穿越台阶、跑过斜坡外,还能在工厂场景中协助工人一同办公。 业界同样猜测,波士顿动力会与现代汽车的智能出行业务结合起来,创造出类似变形金刚的无人驾驶智能车。

“我爱机器人,我的长期目标是机器人像动物和人一样运动自如。”
在雷伯特看来,要达到硬件、软件以及运动行为三者的协调,才能达成其理想的机器人。简而言之就是需具备三项能力:平衡性和动态运动能力、运动控制能力以及移动感知能力。
一个性能优越的足式机器人,能在任意地方、任何地形保持平衡,自由活动,并且可以灵活地操控物体,在移动的过程中轻松完成各项操作任务,同时可以感知空间中物体的稳定存在,有效避开障碍。
譬如从A点到B点的移动,机器人首先要对环境有一定的感知能力,从而规划出一条合理的路线,使用运动控制算法测算出合理的“关节”力量配比。当机器人开始移动时还需要“关节”快速响应,准确完成预期动作。
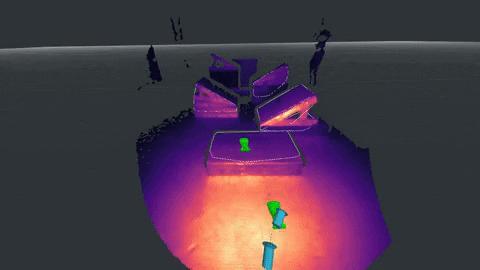
Atlas第一视角的路线规划
当遇到障碍物时,还需要理解并考虑障碍物的属性、质量和需要使用的“力”等。比如遇到一个塑料袋,不会将其判断成一个实体。
波士顿动力的技术领域主要涉及液压驱动和电液混合驱动、步态规划、平衡控制、复杂地形动态规划以及自我回正等运动控制技术,这些技术也保证了机器人具有较强的运动能力。
液压驱动的难度在于,使用液压系统的设备必须配备缓冲设备(蓄能器),加之整个液压系统工作介质的压缩性, 导致机器人模型的非线性程度陡然增加,仿真难度极大。
不过,液压驱动的显著优势是其功重比非常大,响应速度快、控制精度高且具备极高的负重能力和爆发力。在同样的空间内,用液压元件所做的功是电机的数倍甚至是数十倍。如果说几个电驱的机器人能拉动一辆卡车,那么一个液压的机器人就能拉动一架中型飞机。
此外,仅在步态规划方面,波士顿动力就曾申请许多专利。包括使用控制器控制阀适时进行开关动作,实现按需高功率或低功率模式切换;通过判断关节承受的载荷类型和大小,以选择适当的液压或电动驱动器,使得机器人的功率消耗最低。这一系列的专利,都有助于液压系统运行更加高效、减少功耗。

波士顿动力的产品先进性,除了依赖顶尖团队及创始人的热爱外,美国的机器人生态功不可没。
从上世纪六七十年代起,美国就占据着全球机器人技术的制高点。
世界上最早的工业机器人Unimate(尤尼梅特)、第一台带有触觉传感器的机器人、第一个智能移动机器人——夏克机器人、全自动六轴关节机械臂——斯坦福机械臂都诞生在美国。
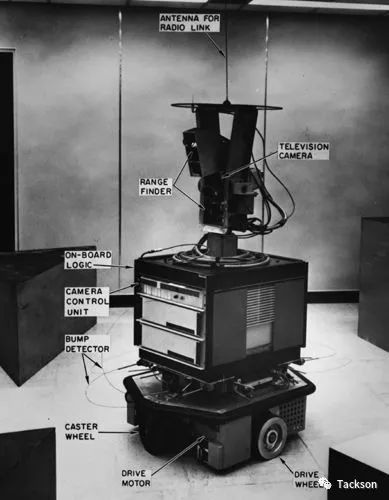
第一台移动机器人Shakey
在高精技术的引领下,形成了美国机器人的四个创业创新公司聚集区,分别是硅谷、波士顿、匹茨堡和底特律。
其中,波士顿被称为“人工智能”诞生地,其所在的马萨诸塞州自工业革命起,便是美国制造业中心,更聚集了麻省理工学院、哈佛大学、塔夫茨大学、波士顿大学等诸多知名院校、以及雷神公司、宝丽来等新兴科技制造公司。
在二战中,凭借MIT的创新力以及区域制造力,波士顿成为了二战期间美国最重要的军事研发、制造中心之一,128公路沿途遍布实验室,被称为“科研一条街”。
良好的产业生态以及人文环境,在某种程度上成就了波士顿动力。一家科技新星的冉冉升起,永远无法只靠单打独斗,而是要整个产业生态的奠基、整条产业链上的协同。
高工移动机器人在与多位行业人士的接触中,他们也都表达了对国内产业链不断完善、升级的期冀。往往生态优先,才会有企业领先。
波士顿动力沿袭了美国精研技术之风,也同样继承了其弊端:学术与产业脱离,导致机器人规模化落地缓慢。
美国技术领先,在早期却没能采取积极的措施推动技术的产业化,导致工业机器人在市场应用中处于劣势。
八十年代,随着日本及西欧国家在高新技术领域的崛起,美国与日本在以汽车为首的制造业短兵相接,最终日本更胜一筹,于1980年跃居世界最大汽车生产国宝座。这一年,也被业界称为“机器人元年”。
为扭转劣势,联邦政府抓住机遇出台了一系列政策法规,推动政府与大学的机器人研究成果向产业界转移,例如著名的《拜杜法案》,为期十年的“战略计算倡议”等系列法规。
这些政策成效显著。1986年美国机器人产量为1984年的17倍,1990年达1986年的10倍。
但随着全球化进程加速,中国、欧盟、日本、韩国等机器人技术崛起,美国的机器人地位也持续受到冲击挑战。
作为一个典型的学院派创业公司,波士顿动力也重技术发展而轻视了商业化落地,创始人雷伯特对研发机器人的追求胜于对盈利的渴望。他曾表示,“没有经历至少25年潜心研究的机器人产品,不足以商业化。”
因此,直到2020年,波士顿动力的商业化进程才正式起步。而商业化进程姗姗来迟是一方面,作为机器人技术的顶尖公司,波士顿动力的落地困境还有更深层次的原因。
弗若斯特沙利文预测,到2026年,全球人形机器人市场规模将达到80亿美元;高盛预计,到2035年,在蓝海市场情景下,人形机器人市场能够达到1540亿美元的规模。
与未来广阔市场前景割裂的是,当前人形机器人公司的生存现状颇有些惨淡。
波士顿动力三次收购,身价从2013年被谷歌收购时的30亿美元,缩水至现在的9.21亿美元。去年4月份,著名的本田阿西莫(ASIMO)机器人便正式宣布退役,结束了22年的职业生涯 。
如何找场景、实现大规模落地?这是摆在所有移动机器人企业面前的难题。
首先是价格。波士顿动力正式开售的Spot Mini,售价为52万人民币左右,据称Atlas,售价则是200万美元。
价格居高不下,主要来自零部件成本。据报道,人形机器人整体的自由度/关节数量通常为20个至50个,一个自由度对应一台伺服电机,国外电机价格通常为5000至6000元,甚至上万元,国产电机价格也在2000元以上。因此一台人形机器人售价百万美元并不鲜见。
如此高昂的价格,注定无法在C端大面积铺开,因此波士顿动力主要的客户群还是集中在B端。但B端用户对于成本与价格的考量往往比C端用户更加理性且严格。
波士顿动力机器人功能多样,配置先进,堪称当下机器人技术的“顶配”。但对于建筑或能源开采行业的用户而言,他们所需要用到的只是其中的一个或几个功能,性价比并不高,并且还有更廉价的替代方案。
具体到落地方面,更为尴尬的是,人形机器人的续航相当差。人形机器人能耗较大,波士顿动力的Atlas和Spot Mini,续航时约为90分钟,而大部分双足的人形机器人连续工作时间都在2小时以内。这样的续航时间,显然不能支持机器人真正深入工业场景工作。
因此,尽管Spot已相对廉价,但据媒体报道,在出售半年后,Spot也仅被卖出了大约400台。而当机器人久久无法实现其商业价值,波士顿动力也只能迎来一次次被收购。

为促进人形机器人落地,近年来,声名鹊起的特斯拉“擎天柱”、小米“铁大”面向的都是C端个人消费者。“擎天柱”试图将人形机器人的售价打到2万美元以下,主要的措施就是以电驱替代液驱,实现人形机器人产品标准化、低成本和可量产。
不过电驱比起液驱,性能还有一定差距。有行业人士认为,只有将电驱提升至Atlas水平,并且机器人续航时间应达到3至10个小时。人形机器人商用才有望迎来爆发式成长。
只是市场注定会落后技术,而走在最前列的波士顿动力尤甚。放大来说,这是整个移动机器人行业的困境。
我国移动机器人尽管发展多年,市场广阔,但大部分公司仍未实现盈利。不少专业人士的共同感受是,移动机器人尽管性能稳定,功能多样,但放眼整个市场,还未找到它们合适的立足之地,距离市场放量还有一定差距。
尽管如此,波士顿动力无可替代的核心优势仍是尖端技术,如今“机代人”趋势不可逆转,机器人市场的爆发可见曙光。而唯有坚持技术创新,才能在未来的市场里掌控先机。
“在过去的40年里,机器人技术已经取得了长足的进步,但我们还有很长的路要走。”马克·雷伯特说道。
商业变现的危机仍在持续。但未来,波士顿动力仍致力让机器人更智能、敏捷灵巧,更易用,也更像人。
