主动扭矩矢量控制就是另一回事了。三菱的S-AYC是一套基于离合器的机械装置。左右后轮分别与一组离合片相连,我给它取个名字叫“输出片”,源自中差的传动轴与另一组离合片连接,我叫它“输入片”。

文| 驾仕派 休不眠
信不信由你,十代三菱Lancer Evolution那套四驱系统是有史以来最复杂的AWD系统之一 ——准确的讲,这是横置前驱车中最先进的AWD系统。
因为它拥有货真价实的前中后三个差速器,每个差速器都内置了一套限滑和主动扭矩矢量控制装置。

S-AWC综述
三菱把Evolution X上的那套AWD系统命名为“S-AWC”(超级全轮控制系统),以下是它的主要构件。
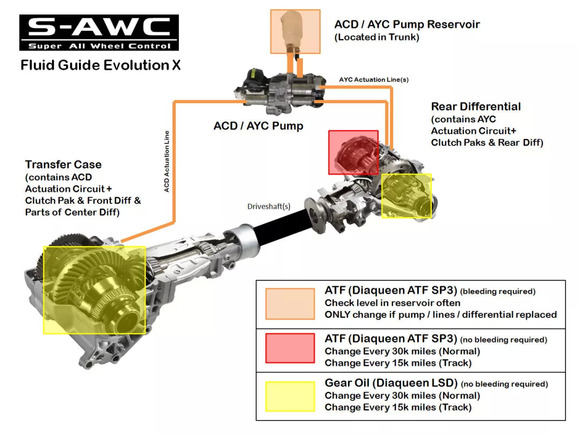
S-AWC的构成——
前轮:螺旋齿限滑差速器;
中央差速器:螺旋齿型,默认50:50扭矩分配,调节前后轮动力分配比的电控多片离合器;
后轮:螺旋齿限滑差速器,配上行星齿轮组,实现左右后轮扭矩矢量化,三菱称它为Active Yaw Control(主动式舵角控制器);
前桥差速器
S-AWC使用一套螺旋齿限滑差速器:
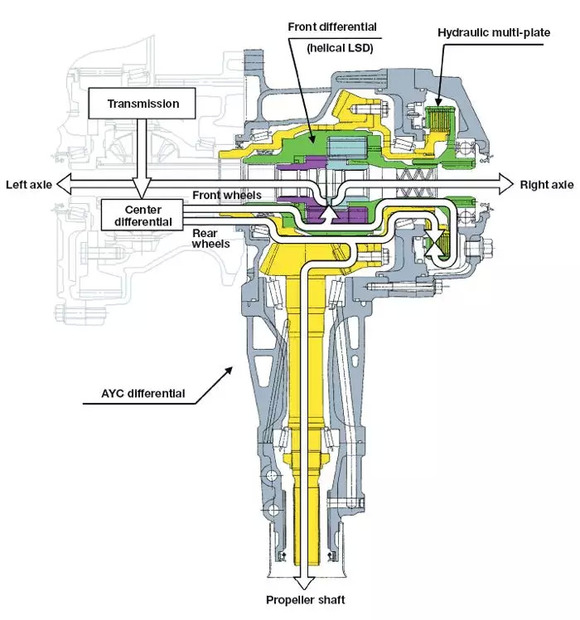
这样的设计很普遍,福特RS和思域Si也这么干。请注意右侧的多片离合器是中央差速器的,与前差速器无关。
中央差速器
它和变速箱是一体的。
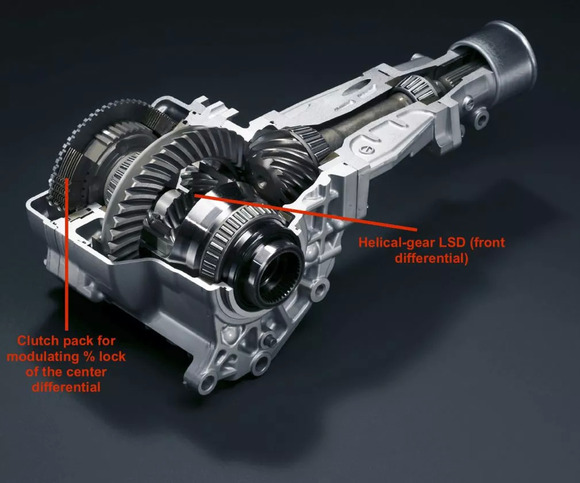
下面的剖视图是上一代的,但Evolution X的变速箱+中央差速器的布局与之非常相似:
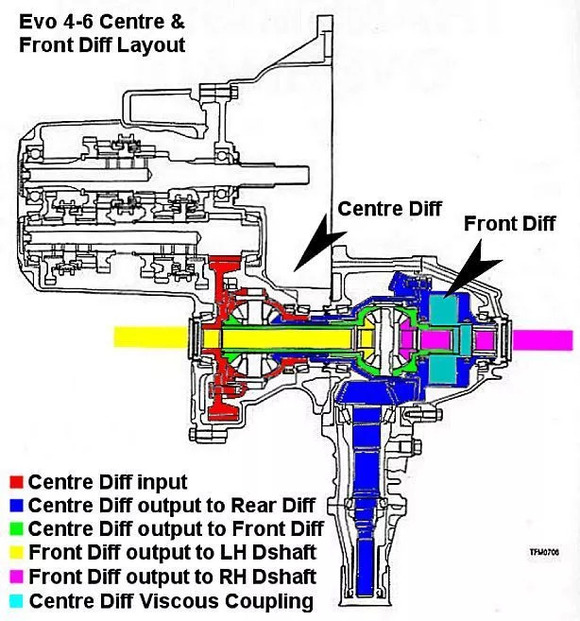
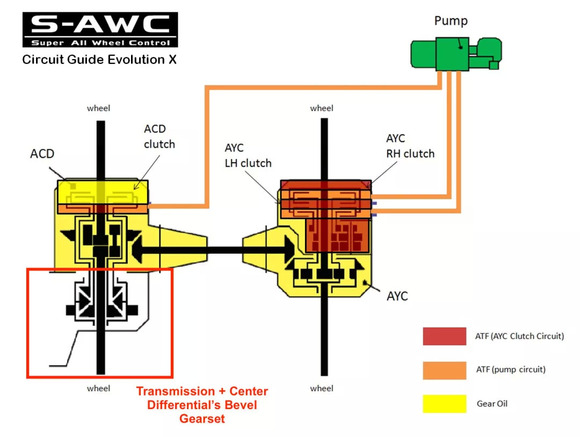
中央差速器的限滑离合器与前差速器联结,如下图所示:

锥形齿轮中央差速器默认将扭矩平均分配给前后桥(防滑箱);同时,它利用一套电控离合器来调节前后扭矩的分配比。
它与前差速器集成在一起,我将关键部位做了标记,方便你理解这个设计:
那么如何用离合器实现前后扭矩分配?请注意离合器输入/输出端之间的静摩擦力,它决定了输出多少动力。如果传输的动力超出了规定的静摩擦值,离合片就会滑动,额外的动力就没法输送出去。
比如我们需要前30后70的扭矩分配,此时引擎输出100马力,那么离合器的静摩擦值就必须精确调整到能刚好传递30马力到前轮,不多也不少。
调整静摩擦值的公式如下:
静摩擦力(Fmax)=静摩擦系数(μs)×压力(Fn)
由于静摩擦系数是固定不变的,ECU只需通过液压泵控制压力,就可以调整离合片输入和输出端的静摩擦力大小。
后桥差速器
S-AWC的后差速器是它的亮点。因为它是一套主动扭矩矢量控制差速器,官方说法叫“S-AYC”。
事实上,三菱是人类历史上第一家推出带扭矩矢量控制差速器的量产车(1996年,第四代Evolution)的车企。
下面的剖视图就是Evolution X后轮的S-AYC系统:

请注意,S-AYC和限滑差速器有根本的不同。
限滑差速器的功能是向转速更慢的车轮输送更多扭矩(因为打滑的车轮转的更快)。不过,过弯时外侧车轮转动更快,反倒需要更多扭矩,所以,一个“普通”的限滑差速器对车辆的弯道性能来说,或多或少有点儿弊大于利。
主动扭矩矢量控制就是另一回事了。三菱的S-AYC是一套基于离合器的机械装置。左右后轮分别与一组离合片相连,我给它取个名字叫“输出片”,源自中差的传动轴与另一组离合片连接,我叫它“输入片”。
过弯时,转动更快的外侧车轮需要更多的扭矩,以更快地出弯,让车辆的操控更加迅捷。然而与此同时,传动轴(也即输入片)却转动得相对更慢。
想让转动更慢的输入片向转动更快的输出片传递动力,这是不可能的。因此,S-AYC得想出一个办法,让慢转输入片向快转输出片传递动力。
这就意味着,当车轮转动更快时,它连接的输出片必须转得比输入片慢;而车轮转动更慢时,它对应的输出片应当比输入片转动更快。要实现这一点,这套系统一定得有两套不同的齿比,这也就是行星齿轮组被引入S-AYC差速器的原因。
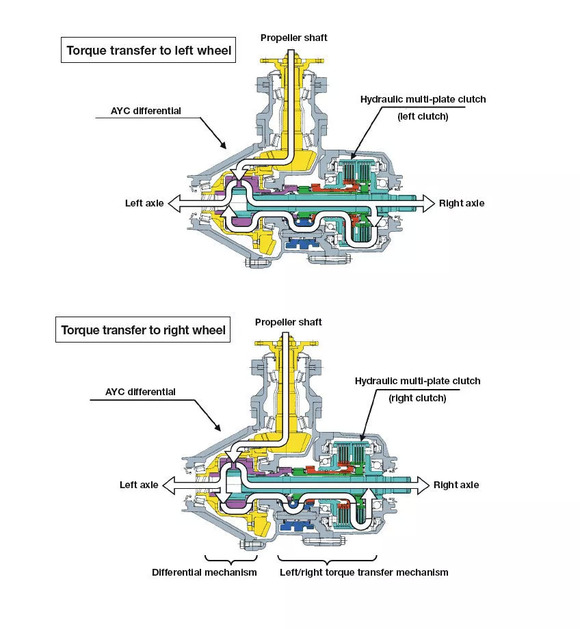
▲如上所示,S-AYC由两组离合器和一组行星齿轮构成。离合器A控制“左轮扭矩”,离合器B控制“右轮扭矩”。两个离合器都与行星齿轮组相连,后者设置了特殊的齿比。
这样一来,S-AYC在任何工况下都可以向左右轮分配更多的扭矩(“active”之名由此得来),这也是它与限滑差速器的不同之处。
目前只有斯巴鲁WRX STI的四驱系统能与之媲美。
STI使用一组后置行星齿轮中央差速器+两层限滑机构(机械+电控),它的效率堪与EVO锥形齿轮中央差速器匹敌。
不过,STI使用托森后差,通过制动来实现类似扭矩矢量控制的动作。这样的设计就不如EVO的S-AYC后差来得高级——后者在主动调节左右扭矩分配方面,有更高的自由度。
很不幸,2015Lancer Evolution成了绝唱。如果你想拥有这套四驱系统的巅峰之作,得乘着还能买到赶紧下手,近期不太可能会有比这更好的四驱了。
